Séquence 5
Comment programmer un véhicule automatisé ?
Je découvre
Travail à réaliser :
1- Sur une feuille de classeur, recopier le titre et la problématique.
2- Tracer un trait sur toute la largeur de la page.
3- Écrire les rôles de chacun pour cette séquence :
- Coordonnateur :
- Secrétaire :
- Informaticiens :
4- Tracer un trait sur toute la largeur de la page.
5- Appeler le professeur pour avoir le classeur d’équipe.
6- Essayer en équipe au crayon de résoudre le labyrinthe au début de la feuille et répondre à la question (a) - uniquement sur le classeur d'équipe.
7- Prendre connaissances du Doc 1 en cliquant sur le lien.
8- Recopier et répondre aux questions suivantes :
- En utilisant la première stratégie, quel chemin votre véhicule prendra-t-il dans ces deux cas de figure ? (Ne pas répondre par écrit : coller et compléter les deux labyrinthes distribués par le professeur)
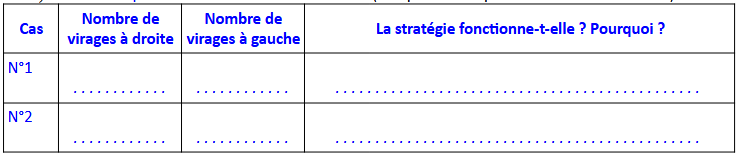
- Comment peut-on commenter ces deux cas ? (recopier et compléter le tableau ci-dessous)
- Que peut-on en conclure sur cette stratégie ?
- En utilisant la deuxième stratégie, quel chemin votre véhicule prendra-t-il dans ces deux cas de figure ? (Ne pas répondre par écrit : coller et compléter les deux labyrinthes distribués par le professeur)
- Que peut-on en conclure sur cette stratégie ?
9- Le secrétaire complétera la feuille de votre équipe.
10- Prendre connaissance du doc en cliquant sur l'image suivante (uniquement les chapitres 'Introduction' 'chaîne d'informations' et 'exemples' :

11- Représenter la chaîne fonctionnelle de votre véhicule : écrire sur votre feuille "Chaîne fonctionnelle du véhicule automatique", tracer cette chaîne et demander au professeur les images à y coller
Je comprends
J'applique
Travail à réaliser :
Vous allez maintenant programmer votre véhicule pour qu'il avance tout droit, sauf lorsque qu'il rencontre un mur : il doit alors tourner à droite (pour avoir le mur à "main gauche")
ATTENTION : pour la suite de la séquence, il faut toujours passer par Makecode, pour cela, cliquer sur le logo suivant :
1– Il faut tout d’abord Tester* le sens de rotation des moteurs et la broche sur laquelle chacun est relié, pour cela :
- programmer tout d'abord le moteur branché en P0 à 50%
- télécharger le programme dans la carte et noter quel moteur tourne et dans quel sens (sur le classeur d'équipe)
- programmer ensuite le moteur branché en P1 à 50%
- télécharger le programme dans la carte et noter quel moteur tourne et dans quel sens (sur le classeur d'équipe)
* Cliquer sur le lien pour ouvrir le document ressource.
2- Prendre connaissance du document ressource capteur ultrasons en cliquant sur le lien, et reformuler en équipe son principe de fonctionnement. (uniquement dans le classeur d’équipe)
3- Il faut maintenant Experimenter* le capteur de distance, pour voir à quelle distance du mur il faudra tourner.
* Cliquer sur le lien pour ouvrir le document ressource.
4–Sachant que le détecteur de devant est branché en P2 et celui de gauche en P15, faire le programme de votre véhicule, en prenant en compte les données notées (si un moteur tourne vers l'arrière lorsqu'il est à 50%, il faut le programmer à -50% ; si on veut aller à droite on ne fait tourner que le moteur de gauche, et inversement). Afficher la direction par une flèche sur l'écran. Ajouter un arrêt total en appuyant sur le bouton A .
5- Télécharger les programmes, demander les véhicules et téléverser pour tester.


